Histoire de la robotique
Dix événements majeurs…
1920 - Naissance du terme "robot"
Inventé par Josef Capek et formé sur la base du mot Tchèque "robota" signifiant "travail forcé" ,"travail pénible", ou encore "corvée", le mot robot a initialement été utilisé dans la pièce de théâtre de Karel Capek : "Rossum's Universal Robots". Ecrite en 1920, cette pièce abrégé en "R.U.R." conte l'histoire de machines à l'apparence humaine mais dénuées de sentiments et possédant une intelligence supérieure. Mais celles-ci se retournent bientôt contre leur créateur et deviennent un véritable danger pour l'humanité.

Ces trois Lois assez particulières ont été mentionnées pour la première fois dans la nouvelle de sciences-fiction "Cercle vicieux" de l'écrivain Isaac Asimov :
Première Loi : Un robot ne peut blesser un être humain, ou par son inaction, permettre qu'un être humain soit blessé.
Deuxième Loi : Un robot doit obéir aux ordres qui lui sont donnés par des êtres humains, sauf quand de tels ordres entrent en contradiction avec la Première Loi.
Troisième loi : Un robot doit protéger sa propre existence aussi longtemps qu'une telle protection ne s'oppose pas à la la Première ou à la Deuxième Loi.

Un peu plus tard une nouvelle Loi est inventé ("la Loi Zero"), définie par l'automate R. Daneel Olivaw dans le roman "Les Robots de l'Empire", en 1985, toujours par le même auteur :
Années 1950 - Naissance de la robotique
En 1950, le thème du robot commence à intéresser les scientifiques et mathématiciens, impliqués assez profondément dans le sujet pour créer une nouvelle forme de science : la robotique. Parmi ces scientifiques, on trouve notamment le physicien et ingénieur américain Joseph Engelberger, surnommé "Le père de la robotique".
Le robot est maintenant définis comme un engin dirigé par un programme, mais tout de même libre de décider de la plupart de ces mouvements.
1961 - Premier robot industriel : "Unimate"
Ce robot, ressemblant un grand bras robotisé, a été créé par l'inventeur américain Georges Devol, puis vendu à "General Motors" afin qu'il prenne en charge les chaînes de montage de l'entreprise, introduisant donc pour la première la robotique dans un processus de fabrication.

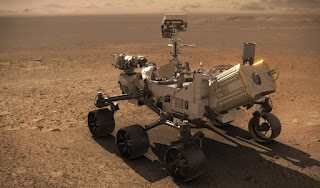
1970 - Les robots au service de la conquête spatiale : "Lunokhod 1"
Le robot Lunokhod 1 est le premier rover envoyé en mission sur la Lune. Celui-ci a été lancé par l'Union soviétique en 1970 dans le cadre du programme éponyme et était téléguidé depuis la Terre. Jusqu'à son inactivité en 1971, Lunokhod 1 aura parcouru près de 11 km, photographié abondamment le sol lunaire (20 000 images) et fait de nombreux test.

1983 - Les robots au service de la médecine : "Arthrobot"
Arthrobot n'est autre que le premier robot médical, développé principalement par James McEwen (ingénieur biomédical), Geof Auchinleck (ancien étudiant de l' U.B.C.) et Bryan Day (chirurgien). Il est utilisé concrètement pour la première fois en tant qu'assistant chirurgical, qui se contente de donner les instruments chirurgicaux sur demande, lors d'une opération orthopédique à Vancouver, en 1984.

2000 - Les robots humanoïdes : "ASIMO"
ASIMO (pour "Advanced Step in Innovative Mobility") est un robot humanoïde à l'apparence sympathique développé par la société Honda capable d'imiter précisément de nombreuse mobilités/mouvements humains. C'est ainsi un robot ayant la possibilité de marcher, courir, monter des marches, rester en équilibre… et dont le but premier est de venir en aide aux personnes malades ou âgées.

2004 - L'ACM R5 :
Ce robot serpent amphibie à la structure rigide, conçu au japon par HiBot, est inspiré du serpent et de sa façon de se mouvoir dans l'espace. Cette machine est donc un représentant de le robotique de biomimétisme. Il est capable de se déplacer en milieu aquatique et terrains complexes, et de mouvements à la fluidité impressionnante.

Présentation de deux automates : "Le flûtiste de Théroude" et "Le Turc mécanique"
1770 - "Le Turc mécanique"
Surnommé l'automate joueur d'échecs, ce robot à été conçu par Johann Wolfang von Kempelen et a été révélé au public en 1770. Il serait alors capable de jouer aux échecs et de résoudre le "problème du cavalier". Si au premier abord, cet automate, vêtu d'une cape et d'un turban et assis derrière une table en érable, semble jouer par lui-même et être doué d'une réflexion propre, il s'est avéré qu'un humain dirigeait le robot par l'intermédiaire d'un système d'engrenage, dissimulé dans un des compartiments de la table qui maintenait l'automate. L'original ayant été partiellement brûlé, un nouvel exemplaire plus moderne et cette fois contrôlé par un logiciel a été créer pour lui succéder.

Le nom de cet automate vient du créateur de jouets et d'automate français, Alexandre Nicolas Théroude. Cet automate extravagant est capable de jouer de la flûte et est actionné par un orgue mécanique, et est considéré comme le premier automate possédant un mécanisme à l'intérieur même de son "corps".



Commentaires
Enregistrer un commentaire